

Prototipo di mini-trattore sviluppato per vigneti a pergola su pendenze terrazzate. A tutt’oggi in molti contesti si praticano ancora svariate attività agricole che non è esagerato dipingere come eroiche per le difficoltà tecniche e gestionali in cui vengono realizzate, spesso anche a spregio delle condizioni di sicurezza del personale addetto. Tra queste attività sicuramente vi sono da menzionare quelle relative alle viti coltivate a pergola in aree terrazzate su pendii particolarmente scoscesi (quando non in presenza di veri e propri dirupi). Queste situazioni si riscontrano ancora in molte zone del Nord Italia (Trentino Alto-Adige, Valle d’Aosta, Valtellina) e pongono non pochi problemi di meccanizzazione, sia per l’accesso ai campi, sia per la manovrabilità e la gestione delle operazioni sui campi stessi. I problemi più frequenti riguardano: i) presenza di terrazzamenti con larghezze di transito estremamente ristrette; ii) necessità di dovere effettuare manovre di svolta su capezzagne anguste, spesso caratterizzate da pendenze superiori al 60%; iii) presenza di un ridotto spazio di lavoro direttamente al di sotto della pergola, di norma insufficiente ad ospitare un uomo in piedi al lavoro. In genere, le motrici tipiche dei sistemi convenzionali di meccanizzazione ben difficilmente possono essere impiegate su pendii con pendenze superiori al 40%, avendo a disposizione larghezze di transito di norma inferiori a 1,20 m. Il tutto, poi, è anche ulteriormente complicato dall’avere spazi verticali al di sotto della pergola mediamente limitati a 1,60÷1,80 m, a seconda dell’inclinazione del tetto del sistema di allevamento e degli ingombri degli organi vegetali (corpi fruttiferi, in particolare) al di sotto del tetto stesso. Queste dimensioni sono, comunque, tali che difficilmente i mezzi convenzionali possono transitare con i loro dispositivi ROPS correttamente posizionati (di regola vengono abbattuti). L’esigenza di trovare nuove soluzioni alternative per consentire una efficace e sicura meccanizzazione in questi contesti è, quindi, particolarmente sentita. Il prototipo Sulla spinta delle sollecitazioni di un gruppo di viticoltori dell’area produttiva del St. Magdalen, zona viticola tipica dei versanti montani circostanti il comune di Bolzano, per l’appunto caratterizzati da terrazzamenti pergolati, la Facoltà di Scienze e Tecnologie della LUB ha partecipato allo sviluppo di un trattore 4RM di nuova concezione, idoneo ad impieghi in simili contesti. Il prototipo è stato concepito in modo da soddisfare gli obbiettivi operativi elencati nel box sottostante.
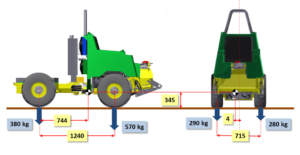
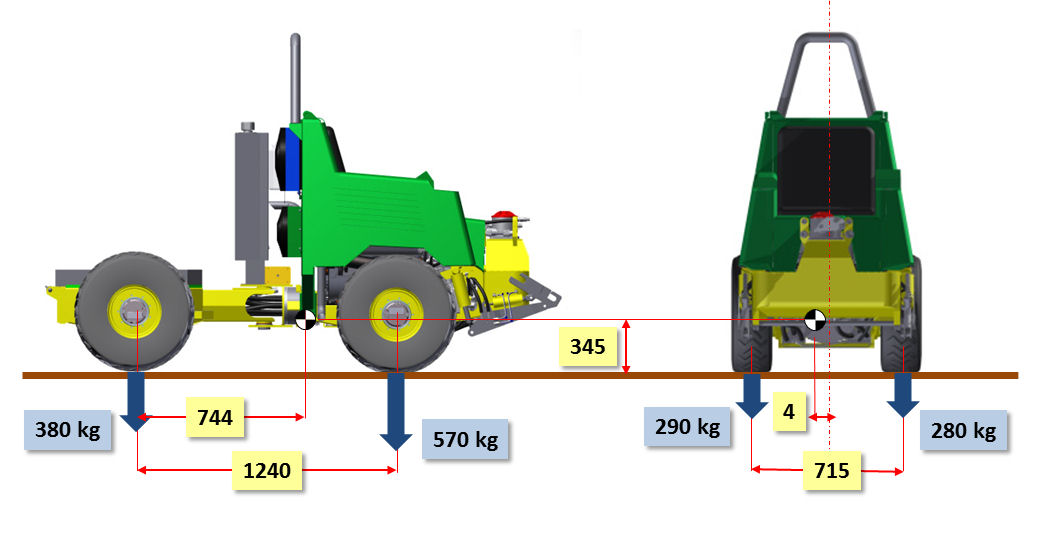
- Le dimensioni del prototipo (in mm).
La versione realizzata, e successivamente testata in campo, è una macchina di architettura inedita definibile come trattore porta-attrezzi a carreggiata stretta. Le sue caratteristiche ne fanno un mezzo specializzato per operazioni su terreni declivi e con spazi difficilmente accessibili, ulteriormente completato dalla possibilità di accoppiare anteriormente, tramite un attacco a tre punti e direttamente sotto il punto di osservazione del guidatore, eventuali operatrici leggere. Il telaio è articolato con sterzo su perno centrale per consentire le massime prestazioni in manovra. Il motore (20 kW) ed il sovrastante posto di guida sono alloggiati sul treno anteriore, a garanzia di un’ ampia visibilità e accessibilità per gli operatori. Il posto di guida, inoltre, è attrezzato con una plancia comandi estremamente semplificata, costituita da un doppio sistema a joystick (il primo per la guida del trattore con una cloche, il secondo per il controllo delle operatrici di volta in volta accoppiate), in sostituzione del convenzionale sistema volante/cruscotto: in fase di lavoro l’operatore si trova, così, ad avere lo spazio frontale completamente libero, quasi si trovasse seduto su una sorta di poltrona mobile. Il pianale porta-attrezzi è alloggiato sul treno posteriore, connesso al primo attraverso trasmissioni e sistemi idraulici che consentono di semplificare e limitare gli ingombri costruttivi. Anche la trazione integrale sulle quattro ruote isodiametriche è di tipo idrostatico. La versione al momento realizzata prevede di operare con i seguenti attrezzi: atomizzatore (da vedersi come utilizzo), falciatrice, trinciastocchi, contenitore per trasporto di prodotti sfusi (versione dumper). Tale versione, pertanto, di per sé già si presta anche ad impieghi agricoli extra-vigneto, come le attività di fienagione e le operazioni di trasporto e manipolazione dei prodotti nel centro aziendale. Le prestazioni Si sono realizzate due versioni di prototipi. La prima con lo scopo di verificare preliminarmente le prestazioni della nuova architettura proposta nelle sue reali condizioni di lavoro, in termini sia di stabilità sia di produttività del lavoro. La seconda (versione dumper), per affinare i dettagli costruttivi e impostare gli standard di sicurezza nelle loro formulazioni finali pressoché definitive. L’iniziativa progettuale ha sempre avuto riscontri positivi, specie in merito a:
- comfort dell’operatore: il posto di guida è confortevole e consente un agevole controllo del contesto di lavoro; inoltre è facilmente accessibile, se confrontato con le soluzioni proponibili con i piccoli trattori commercialmente disponibili di analoga potenza;
- sensazione di sicurezza: il posto di guida viene anche sempre percepito come molto sicuro in quanto: i) il fatto di non avere ingombri frontali dà la sensazione di una via di fuga agevole in caso di ribaltamento laterale del mezzo (tenendo presente che in fase di lavoro sotto pergola con ROPS abbattuto si può evitare di mantenere la cintura di sicurezza allacciata); ii) il trattore riesce a superare con estrema facilità e sicurezza anche pendenze sostenute (in manovre su curva, si sono potute riscontrare prestazioni positive fino a valori del 55%); iii) in laboratorio si è potuto rilevare che in condizioni statiche il rollio avviene su pendenze del 91% e 93% con telaio, rispettivamente, allineato e con ruote in sterzata a monte;
- facilità di manovra in capezzagna e buona produttività del lavoro: il fatto di avere l’accoppiamento trattore-attrezzo con soluzione articolata e con entrambi gli assali motori consente massime prestazioni di aderenza e ottima manovrabilità anche su angoli di sterzatura particolarmente critici; ciò si traduce – di norma – nella possibilità di accedere da un filare a quello immediatamente adiacente senza dover effettuare alcun tipo di manovra in capezzagna e con tempi di curvatura relativamente rapidi; su distanze interfilari <1,80 m, prove comparative condotte durante trattamenti fitosanitari hanno fatto riscontrare capacità di lavoro operative di 1,00÷1,12 ha/h, contro valori di 0,77÷0,82 di un analogo motocoltivatore attrezzato con atomizzatore, utilizzato come testimone; rispetto a quest’ultimo, inoltre, il prototipo ha garantito tempi medi di svolta inferiori del 30-40%;
- qualità del transito nei passaggi interfilari: la carreggiata stretta (715 mm), la trazione integrale e il posizionamento basso dei baricentri (345 mm) consentono un agevole transito della macchina anche su passaggi interfilari caratterizzati da carreggiata in piano ridotta a 110-120 cm; e ciò con velocità di norma superiori agli altri mezzi convenzionali, specie rispetto ai mezzi cingolati;
- qualità del lavoro rispetto all’interazione macchina-suolo: nel complesso le prestazioni sono sempre più che soddisfacenti anche rispetto ai danneggiamenti provocabili al suolo, specie nelle cappezzagne; rispetto ad un mezzo cingolato, infatti, il degrado della struttura superficiale del terreno risulta praticamente nullo.
Le prospettive I prototipi saranno sottoposti ad ulteriori test in campo nella prossima stagione produttiva per poter essere perfezionati in vista di una produzione in serie del mezzo. Lo sviluppo vede coinvolta anche una PMI locale (la WM srl di Prato all’Isarco, BZ), leader europea nella costruzione di macchine per la manutenzione di piste su ghiaccio e recentemente interessata ad attività di diversificazione e trasferimento tecnologico, focalizzate soprattutto sullo sviluppo di nuove motrici idonee ad operare nelle condizioni estreme dell’agricoltura di montagna altoatesina. Una volta introdotte e verificate tali migliorie, si prevede di omologare il mezzo come trattrice agricola con pianale di carico (in base alle norme della categoria T2 previste dalla direttiva comunitaria 2003/37). Si ritiene che il suo impiego possa essere destinato a modificare l’assetto organizzativo di molte piccole aziende produttrici operanti in aree disagiate, anche grazie ad una sostanziale semplificazione della meccanizzazione aziendale e conseguente riduzione dei costi di produzione (stimabile in non meno del 25%). [box title="Gli obiettivi operativi del prototipo" color="#c00"]
- Capacità di operare in contesti viticoli in cui il lavoro effettivo deve essere svolto in spazi estremamente ristretti, in termini di transitabilità su spazi orizzontali e verticali, qual è il caso dei sistemi di allevamento a pergola, indipendentemente dalla pendenza da gestire durante il lavoro effettivo stesso.
- Capacità di operare in contesti ad elevata pendenza (con picchi fino al 65-70%), in fase sia di lavoro effettivo, sia di lavori accessori (manovre, svolte, transiti per spostamenti o trasporti etc.).
- Capacità di consentire manovre rapide e sicure in ambienti notevolmente ristretti e molto spesso caratterizzati da repentini cambi di ripidità, possibilmente senza la necessità di effettuare arresti e retromarce durante le manovre stesse.
- Garantire prestazioni analoghe – quanto più possibile – a quelle dei mezzi cingolati, senza tuttavia soffrire delle limitazioni operative tipiche dei cingolati spessi (ergonomia, transitabilità su strada, adattabilità al suolo etc.); in particolare, evitando il pericolo di fenomeni erosivi favoriti dalla formazione di profonde ormaie al suolo nei punti di manovra o di inversione della direzione di lavoro.
- Soddisfare esigenze di polifunzionalità, per impieghi eventualmente estendibili ad applicazioni extra-frutticole se non addirittura extra-agricole.
- Assicurare adeguati standard di sicurezza nei confronti della stabilità del mezzo, specie in riferimento ai rischi di stabilità laterale e longitudinale.
- Garantire adeguati standard ergonomici, a salvaguardia del comfort dell’operatore in lavoro per tempi prolungati, a riguardo sia dei rischi di malattie professionali in caso di eccessiva esposizione a condizioni di vario stress fisico (vibrazioni, rumore e temperatura), sia del benessere momentaneo durante l’esecuzione del lavoro stesso.[/box]
[box title="Come diventerà" color="#c00"] Per il prototipo di mini-trattore sono già allo studio molti miglioramenti costruttivi che, in sintesi, riguardano: 1) l’approntamento dei dispositivi di sicurezza nella loro versione definitiva, ovvero ROPS abbattibili e cinture di sicurezza (molte condizioni di lavoro sotto pergola, come visto, rendono impossibile l’utilizzo dei telai di sicurezza nella normale posizione eretta, avendo a che fare con altezze anche inferiori a 1,60 m; fondamentale, in tali condizioni, la possibilità di utilizzare ROPS rapidamente ripristinabili; 2) l’allestimento di dispositivi elettronici per controllare il disassamento tra treno anteriore e posteriore del mezzo in condizioni di manovre su pendenze critiche, sempre a garanzia di una maggior sicurezza anti-rollio; 3) l’inserimento di un sedile con ammortizzatori a regolazione pneumatica, in grado sia di migliorare il comfort dell’operatore, sia di ridurre gli ingombri verticali.[/box] Articolo a firma di Fabrizio Mazzetto - Libera Università di Bolzano Approfondimenti a cura dell'Autore PER APPROFONDIRE [vimeo]http://vimeo.com/58132866[/vimeo]








{kind=link}
{kind=link}
ottimo mezzo meccanico.Se il prezzo è adeguato (spero) mi interessa molto.
Gradirei dati per localizzare il produttore.
Grazie.
Poglianigiannantonio pogliani